Bases Biomecânicas da Musculação
Cinemática - Descrição de Movimento
O esqueleto humano é um sistema de componentes ou alavancas. Uma alavanca pode ter qualquer forma, e qualquer osso longo pode ser visualizado como uma barra rígida que pode transmitir e modificar força e movimento.
A cinemática envolve termos que permitem a descrição do movimento humano. As variações cinemáticas para um dado movimento incluem:
a) O tipo de movimento que está ocorrendo. b) O local do movimento.
c) A magnitude do movimento. d) A direção do movimento.
Principais Tipos de Movimento do Corpo Humano
Há dois tipos principais de movimento que podem ser atribuídos a quase todos os ossos (ou caminhos que um osso pode percorrer). O esqueleto humano é composto de pequenas alavancas ósseas. Pode-se descrever a trajetória feita pelo corpo como um todo ou descrever a trajetória feita por uma ou mais de suas alavancas componentes.

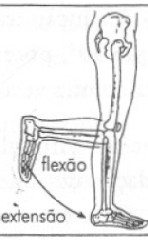
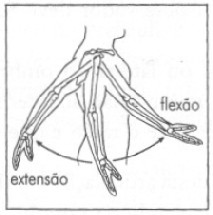
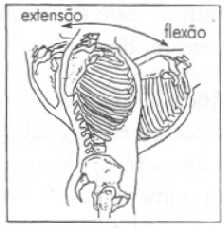
Movimento Rotatório (angular) - é o movimento de um objeto ou segmento em volta de um eixo fixo (ou relativamente fixo), percorrendo uma trajetória curvilínea.
Figura 1 A flexão da coluna é um exemplo de movimento rotatório
Movimento Translatório (linear) - é o movimento de um objeto ou segmento em uma linha reta. Cada ponto do objeto move-se através da mesma distância, ao


mesmo tempo, em trajetórias paralelas. Movimentos translatórios verdadeiros de uma alavanca óssea, sem a concomitante rotação articular, podem ocorrer em pequena extensão, quando um osso é puxado para longe de sua articulação (descompressão) ou empurrado diretamente no sentido desta articulação (compressão).
Figura 2a Forças compressivas Figura 2b Forças descompressivas na coluna vertebral
Embora pensemos nos músculos como estruturados para realizar movimentos de rotação articular, é importante lembrar que muitas forças exercidas no corpo (incluindo as forças musculares) têm componentes que tendem a produzir movimentos não só rotatórios como translatórios. Os movimentos translatórios nas articulações do corpo humano, até quando realizados em pequenas magnitudes, são importantes para entendermos o estresse e a estabilidade articular.
Localização do Movimento
Uma descrição cinemática de um movimento deve incluir os segmentos e articulações sendo movidas, bem como o lugar, ou plano, do movimento.
Os planos de movimento são chamados de transverso, sagital e frontal. Os movimentos de flexão, extensão e hiperextensão, por exemplo, são
realizados no plano sagital e possuem um eixo frontal.
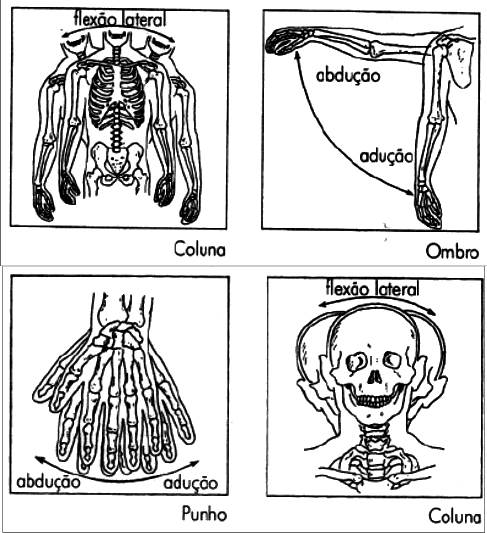
A flexão lateral, adução e abdução são realizadas no plano frontal (ou coronal) e sobre o eixo sagital.
A maioria dos movimentos de rotação medial e lateral é realizada no plano transverso e sobre o eixo longitudinal (ou vertical).
Articulações: Movimentos e Amplitudes
O conhecimento dos movimentos possíveis e seguros de cada articulação do corpo humano, bem como dos graus de amplitude de cada movimento articular, proporciona uma importante diretriz para uma correta análise biomecânica e, conseqüentemente, cinesiológica.
As principais articulações relacionadas à maioria dos movimentos do corpo humano, durante exercícios de musculação, estão descritas a seguir.
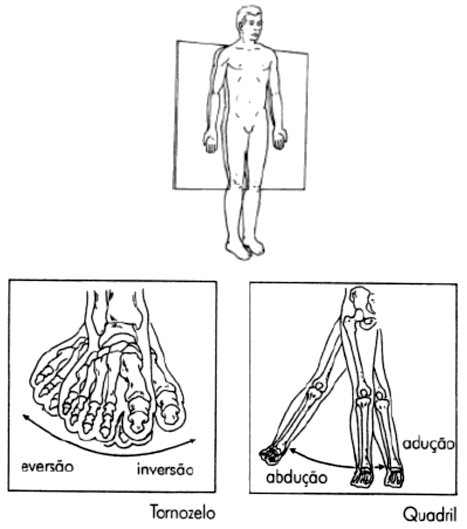
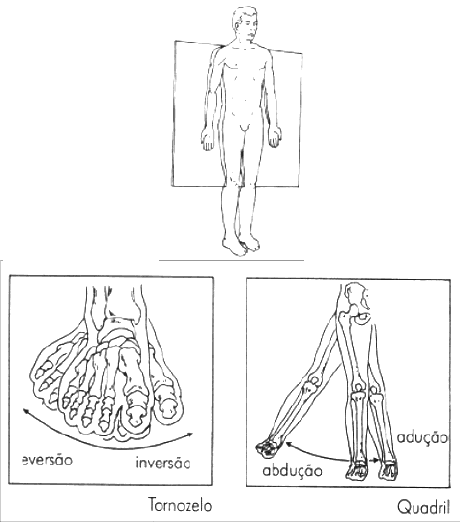
Tornozelo - Esta articulação realiza movimentos de dorsiflexão (ou flexão dorsal), flexão plantar, inversão e eversão.
O movimento de dorsiflexão é realizado numa amplitude média de 15°-
20° (15° com o joelho estendido e 20° com o joelho flexionado).
45°.
A amplitude de movimento para a flexão plantar é de aproximadamente
frontal.
A dorsiflexão e a flexão plantar acontecem no plano sagital sobre o eixo
Os movimentos de inversão e eversão, apesar de ocorrerem na articulação subtalar, são geralmente considerados como movimentos do tornozelo.
Joelho - Articulação do tipo gínglimo (ou dobradiça) modificada. Os movimentos desta articulação são flexão, extensão, rotação medial e rotação lateral.
A amplitude de movimento para a flexão do joelho é de 140°.
A rotação ocorre durante os movimentos de flexão e extensão do joelho e é realizada entre a tíbia e o fêmur. Com o fêmur fixo, o movimento que acompanha a flexão é
uma rotação medial da tíbia sobre o fêmur; com a.tíbia fixa, o movimento que acompanha a flexão é uma rotação lateral do fêmur sobre a tíbia.
Com o fêmur fixo, o movimento que acompanha a extensão é uma rotação lateral da tíbia sobre o fêmur; com a tíbia fixa o movimento que acompanha a extensão é uma rotação medial do fêmur sobre a tíbia.
Quadril - Articulação do tipo esferóide formada pela fossa do acetábulo e a cabeça do Fêmur.
Os movimentos desta articulação são: flexão, extensão, abdução, adução, rotação medial, rotação lateral, circundução.
Quando o quadril está flexionado é possível realizar os movimentos de adução e abdução transversal desta articulação.
As amplitudes médias para os principais movimentos são: flexão 125°, extensão 10°, abdução 45° e adução 10°.
Amplitudes maiores que estas dependem de um movimento combinado com a pelve e a coluna. Por exemplo, 90° de abdução só acontecem com 45° de abdução do quadril combinados com inclinação lateral da pelve e flexão da coluna lombar.
Pelve - Articulação entre a pelve e a coluna lombar e entre a pelve e o fêmur.
Na postura anatômica, a espinha ilíaca ântero superior (E.I.A.S.) fica alinhada com a sínfise púbica no plano frontal.
Quando a E.I.A.S. desloca-se anteriormente em relação à sínfise púbica ocorre uma anteversão ou inclinação anterior da pelve. Como a coluna e o fêmur se articulam com a pelve, a anteversão ocorre concomitantemente com uma hiperextensão da coluna lombar e uma flexão do quadril.
Quando a E.I.A.S. desloca-se posteriormente em relação à sínfise púbica ocorre uma retroversão ou inclinação posterior da pelve. Com a retroversão a coluna lombar realiza uma flexão e o quadril uma extensão.
O movimento em que uma E.I.A.S. de um lado fica mais alta que a do outro lado chama-se inclinação lateral da pelve. Juntamente com este movimento o uma flexão lateral da coluna lombar com uma abdução de uma articulação do quadril e adução da outra.
Coluna - Os movimentos da coluna são flexão, extensão, hiperextensão, rotação para a direita (ou no sentido horário), rotação para a esquerda (ou no sentido anti- horário), flexão lateral e circundução.
Estes movimentos variam de amplitude entre as regiões da coluna.
A expressão "encaixar o quadril", muito utilizada em academias de musculação para movimentos na posição em pé, é uma retroversão da pelve. A retroversão da pelve flexiona a coluna lombar e isto diminui a capacidade da coluna em suportar grandes cargas, motivo pelo qual esta postura não deve ser recomendada.
Escápula - Realiza os movimentos de abdução, adução, elevação, depressão, rotação superior e rotação inferior.
Os movimentos de rotação superior e inferior dependem respectivamente de abdução e adução da articulação do ombro.
A inclinação anterior da escápula ocorre no eixo frontal, com um movimento ântero-inferior do processo coracóide e conseqüente movimento póstero-superior do ângulo inferior da escápula. Este movimento é associado com elevação da escápula.
Ombro - Articulação entre a cabeça do úmero e a cavidade glenóide da escápula. Os movimentos desta articulação são: flexão, extensão, abdução, adução, rotação medial, rotação lateral e circundução.
Quando o ombro está em flexão é possível realizar os movimentos de abdução e adução transversal desta articulação.
As amplitudes para os principais movimentos são: flexão 120°, extensão 45°, rotação medial 70° e rotação lateral 90°. Para os movimentos de adução e abdução transversal (partindo de uma flexão do ombro de 90° como posição zero) as amplitudes são 90° para a abdução transversal e 40° para a adução horizontal.
Partindo da posição zero, uma pessoa consegue realizar ate um pouco mais de 180° de abdução horizontal, porém, este movimento não é realizado somente pela articulação glenoumeral, mas pela adução da escápula e rotação da coluna vertebral.
A adução transversal também pode ser feita em amplitudes maiores que 40°, porém, com concomitante abdução da escápula e rotação da coluna vertebral.
Cotovelo - Articulação do tipo gínglimo (ou dobradiça) formada pela articulação do úmero com o rádio e a ulna.
Os movimentos realizados por esta articulação são flexão e extensão e acontecem no plano sagital sobre o eixo frontal.
A amplitude média para flexão é de 145°. Esta amplitude pode diminuir no caso de uma grande hipertrofia dos flexores do cotovelo e dos flexores do punho.
Rádio-Ulnar - Articulação que realiza os movimentos de pronação (rotaçãomedial do rádio sobre a ulna) e supinação (rotação lateral do rádiosobre a ulna). A amplitude normal de movimento é 90° para ambos osmovimentos.
É muito comum a confusão entre rotação medial do ombro e pronação ou rotação lateral do ombro e supinação. Para a correta análise destes movimentos, o observador deve focalizar a alavanca óssea que se movimenta.
Na rotação medial ou lateral do ombro, o úmero necessariamente se movimenta. O mesmo não acontece se a rotação acontecer na articulação radio- ulnar onde o rádio é que se movimenta.
Punho - Os movimentos desta articulação são flexão, extensão, adução, abdução e circundução. Partindo da posição zero (anatõmica), o punho realiza aproximadamente 80° de flexão, 70° de extensão, 35° de adução e 20° de abdução.
Quando o punho se desloca medialmente, com a articulação rádio-ulnar em pronação, o movimento também se chama abdução. Apesar de a mão estar se aproximando da linha mediana, a articulação rádio-ulnar, nesta situação, não está em supinação (posição anatômica desta articulação).
Movimentos articulares no plano sagital (com o eixo frontal)
flexão dorsal
flexão plon!or
Tomozelo
 \
\ 


Joelho
extensoo
Ombro

Coluno
flexão
Cotovelo
Movimentos articulares no plano frontal (com o eixo sagital)
Cinética: Análise de Forças
Definição de Forças
Força é definida como uma ação exercida por um objeto sobre outro. Este conceito só pode ser usado para descrever as forças encontradas na avaliação do movimento humano.
Forças externas são forças que agem no corpo ou segmento, que provêm de fontes fora do corpo. A gravidade é uma força que, em condições normais, constantemente afeta todos os objetos e, por esta razão, deve ser a primeira força externa a ser considerada no corpo humano.
Forças internas são forças que agem no corpo, provenientes de fontes internas do corpo humano como músculos, ligamentos e ossos.
As forças internas servem para neutralizar aquelas forças externas que danificam a integridade e estabilidade da estrutura articular do corpo humano.
Outras formas de força incluem pressão atmosférica e fricção.
Vetores de Força
Um vetar é tradicionalmente representado por um traço que:
1) Tem uma base no objeto na qual a força está agindo (ponto de aplicação).
2) Tem um corpo e uma seta na direção da força sendo exercida (linha de ação).
3) Tem um comprimento que representa a quantidade de força sendo aplicada
(magnitude).
Força da Gravidade
Gravidade é a atração que a massa da Terra exerce sobre outros objetos e, na superfície terrestre, tem uma magnitude média de 9,8 m/s 2. A força da gravidade da peso aos objetos de acordo com a fórmula a seguir:
Peso =Massa x aceleração da gravidade ou P=m x g
A gravidade age em todos os pontos de um objeto ou segmento de um objeto. Seu ponto de aplicação é dado como centro de gravidade do objeto ou segmento. O centro de gravidade é um ponto hipotético no qual a massa parece estar concentrada e o ponto em que a força da gravidade parece agir.

Num objeto simétrico, o centro de gravidade (CG) está localizado no centro geométrico do objeto. Num objeto assimétrico, o Centro de Gravidade está localizado em direção à extremidade mais pesada, num ponto em que a massa está igualmente distribuída em volta.
* Importante:
A linha de ação e direção da força da gravidade, agindo no objeto, está sempre na
vertical em direção ao centro da Terra, independentemente da orientação do objeto no espaço.
Centros de Gravidade Segmentados
A força da gravidade age em cada segmento do corpo que terá seu próprio centro de gravidade (fig.1.8 a). Se dois ou mais segmentos se movimentam juntos, como um segmento único, a gravidade, agindo nestes segmentos, pode ser representada por um único vetar de CG
(fig.1.8b).
Centro de Gravidade no Corpo Humano
Quando todos os segmentos do corpo estão combinados e o corpo é dado como um único sólido objeto na posição anatômica, o centro de gravidade fica aproximadamente anterior à segunda vértebra sacral. A posição precisa do Centro de Gravidade para uma pessoa depende de suas proporções e tem a magnitude igual ao peso da mesma.
Em outras posições do corpo humano o Centro de Gravidade altera. A quantidade de mudança no Centro de Gravidade depende do grau de desproporção em que o segmento se desloca.
 Figura 1.9 - Centro de gravidade do corpo na posição anatômica
Figura 1.9 - Centro de gravidade do corpo na posição anatômica
Relação entre Estabilidade e Centro de Gravidade
Para a manutenção do equilíbrio do corpo humano, a linha de gravidade deve estar, sempre, em cima da base de suporte (que no corpo humano são os pés).
Quando o corpo se movimenta e o centro de gravidade se move para fora da base de suporte, o indivíduo perde o equilíbrio.
Dado que a linha de gravidade (LG) deve cair sobre a base de suporte para estabilidade, dois fatores adicionais afetam a estabilidade do corpo:
- O tamanho da base de suporte de um objeto.
- A proximidade do Centro de Gravidade da base de suporte
Relocalização do Centro de Gravidade
A localização do Centro de Gravidade do objeto não depende somente da disposição do segmento no espaço, mas também da distribuição da massa deste objeto.
Toda vez que é adicionada uma massa externa ao nosso corpo o novo CG, devido à massa adicionada, se deslocará em direção ao peso -adicional. O deslocamento será proporcional ao peso adicionado.
Braço de Momento de Força
Braço de Momento (BM) é a distância entre o eixo de uma articulação e o ponto de aplicação de força muscular (inserção do músculo).
O braço de momento é sempre a menor distância entre a linha de ação da força muscular e o eixo articular. É achado pela mensuração do comprimento de uma linha traçada perpendicularmente ao vetor de força e intersectando o eixo da articulação.
As linhas de ações de músculos raramente aproximam-se de um ângulo de 90°, o que significaria que a inserção do músculo estaria perpendicular ao osso.
A maioria dos músculos tem linhas de ações que são muito próximas de paralelas aos ossos em que estão inseridos.

Quanto maior for o braço de momento (BM) para um determinado músculo maior será o torque produzido pelo músculo para a mesma magnitude de força.
*Importante:
Dada uma constante força de contração, o torque gerado pelo músculo será o maior no ponto em que a linha de ação do músculo estiver mais longe do eixo da articulação.
O braço de momento (BM) de qualquer força será o maior quando a força for aplicada a 90° ou o mais próximo possível de 90° em relação à sua alavanca.
O ângulo de aplicação de força muscular não é diretamente relacionado com o ângulo articular.

Fig. 1.10 - Braço de momento de força. Note que a distância "d" é a menor distância perpendicular entre a força "F" e o eixo do movimento "E" (articulação do cotovelo).
Braço de Momento da Resistência
Qualquer força aplicada a uma alavanca pode mudar seu ângulo de aplicação à medida que a alavanca se move no espaço. A mudança no ângulo de aplicação resultará num aumento ou diminuição no Braço de Momento (BM) da força da resistência.
O braço de momento (BM) da força da resistência será o maior quando a força for aplicada a 90° em relação à alavanca.
Como a gravidade sempre age verticalmente para baixo, a força da gravidade é aplicada perpendicularmente à alavanca, sempre que a alavanca está paralela ao chão.
Quando uma alavanca do corpo está paralela ao chão, a gravidade, agindo naquele segmento, exerce seu máximo torque.

Fig. 1.11 - Braço de momento de resistência. Enquanto o peso do objeto (P) permanece constante, a distância horizontal (BMR) entre o peso e o eixo do movimento (articulação do cotovelo) muda por todo o movimento, afetando diretamente o torque da resistência.
Força Motiva
É a força que movimenta o sistema músculo-esquelético. Geralmente este nome é aplicado à força feita pelos músculos no esqueleto.
Força Resistiva
É a força que movimenta o sistema músculo-esquelético. Geralmente dá-se este nome à força gerada por uma resistência externa.
Linha de Ação
A linha de ação da força é uma linha infinita que passa através do ponto de aplicação da força, orientada na direção na qual a força é exercida.
Fig. 1.12 - Forças motiva (F) e resistiva (P), braços de momento de força (BMF) e da resistência
(BMR), linha de ação da resistência e eixo do movimento.
Torque
Em movimentos rotatórios, a força e o ponto de aplicação da força no objeto em movimento são importantes.
Rotação depende tanto de onde um peso é colocado - sua distância do eixo - quanto da quantidade de força exercida.
força.
A efetividade de uma força em causar rotação é o torque criado pela
Torque é o mesmo que tendência à rotação. A tendência de uma força em causar rotação depende, da quantidade de força aplicada e da distância entre a força e o eixo (centro) de rotação.
No caso de uma resistência externa, a própria resistência é a força, e o braço de momento desta resistência é a menor distância perpendicular entre o ponto de aplicação da força e o eixo de rotação da articulação.
Para os músculos envolvidos num movimento, a ação do músculo é a força e o braço de momento desta força é a menor distância perpendicular entre a linha de ação da força muscular e o eixo de rotação da articulação.
A fórmula para determinar quanta tendência para rotação existe em uma articulação (Valor do Torque) é igual à Força (F) multiplicada pelo braço de Momento (BM) ou T = F x BM.
Fig.1.13 - Os fatores que criam uma tendência de rotação no sentido da flexão são a força do bíceps e sua distancia do eixo (braço de momento de força).
Os fatores que criam a tendência de rotação no sentido da extensão são o peso do objeto (na mão) e sua distância do eixo (braço de momento da resistência).
Pelo fato de o torque envolver força (F) e braço de momento (BM), a quantidade de força muscular necessária para produzi-Io depende do braço de momento do músculo (distância entre a linha de ação da força muscular e o centro de rotação ou eixo) e o braço de momento da resistência.
Alavancas Músculo-Esqueléticas
No corpo, a maioria dos músculos opera com pequenos braços de momento, porque suas inserções estão próximas aos eixos das articulações. Como resultado, os músculos sempre produzem forças maiores do que os pesos de resistência que eles encontram. Forças de resistência, especialmente aquelas seguras pela mão, têm a vantagem mecânica de estarem a um braço de comprimento do eixo da articulação.
Por isso, conclui-se que o sistema músculo-esquelético tem uma desvantagem mecânica em relação à produção de torque, mas possui outras vantagens que compensam muito esta deficiência.
Entender esta vantagem envolve um maior entendimento dos sistemas de alavancas.
A maioria das cadeias osteoarticulares (cadeias cinemáticas) do corpo é exemplo de alavancas de terceira classe. O eixo de rotação esta localizado em uma extremidade, a resistência (objeto sendo levantado) está próxima da outra
extremidade e a força da contração muscular é aplicada entre as duas. Em alavancas de terceira classe a resistência sempre tem um braço de momento maior do que a força muscular. Por isso, a força de contração do músculo tem que ser maior do que a resistência, para compensar o pequeno braço de momento no qual ele trabalha.
No entanto, as alavancas de terceira classe proporcionam vantagens em relação à quantidade e velocidade de movimento.
No nosso corpo, músculos e ossos giram em torno de articulações. Desta maneira, extremidades distais podem mover-se a maiores distâncias com maiores velocidades do que partes proximais. A habilidade do sistema músculo- esquelético em levantar objetos é vantajosa, mas a habilidade em movê-Ias por grandes distâncias com grandes velocidades é até mesmo mais essencial.
Outra vantagem da alavanca de terceira classe é com relação à natureza da contração muscular. Os músculos podem encurtar-se somente um pouco. Eles têm uma limitada capacidade de excursão (aproximadamente 50% do seu comprimento) então, as alavancas de terceira classe são melhores em relação a movimentos do esqueleto. O músculo pode contrair-se devagar e com uma excursão muito menor para movimentar a mão mais rápido e com grande amplitude. No gesto de trazer a mão para perto do ombro, por exemplo, os músculos flexores do cotovelo encurtam-se 1/4 ou menos do que o comprimento do deslocamento da mão.

No entanto, os músculos devem gerar força bastante para compensar seu pequeno braço de momento.
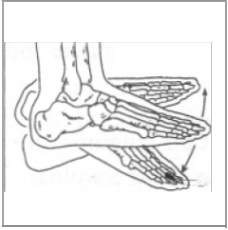
Fig. 1.14. Flexão dorsal do tornozelo. Note que, com um pequeno encurtamento muscular, a distância percorrida pelo pé (e resistência) é muito grande.
Torques Internos e Torques Externos
Dois tipos de torque - interno e externo - existem no corpo humano. Forças operando fora do corpo produzem um torque externo. Por exemplo, os torques externos produzidos por uma barra com anilhas durante o movimento de flexão do cotovelo (rosca direta).
Os músculos, agindo em suas inserções nos segmentos ósseos, produzem torques internos.
No exemplo da rosca direta, a barra exerce um torque no sentido da ação da gravidade e os flexores do cotovelo exercem um torque na direção oposta.
Fatores de Mudanças de Torques
momento.
O torque muda conforme mudam a magnitude da força e o braço de
Os movimentos sempre resultam em mudanças no comprimento do braço de momento (BM) e o comprimento do músculo, no começo de sua contração, afeta a quantidade de força que este pode produzir (relação força- comprimento).
A combinação destas mudanças, incluindo o comprimento do músculo e braço de momento (EM) em cada ângulo do movimento, produz diferentes torques em diferentes posições articulares.
Fig. 1.15 - O torque gerado pela força da contração dos flexores do cotovelo é mostrado em diferentes ângulos. Note que a maior produção de força é a 90° de flexão, quando o bíceps tem o maior braço de momento de toda a amplitude do movimento.
Cadeia Cinemática Aberta e Cadeia Cinemática Fechada
Quando a extremidade distal, livre do corpo humano, se movimenta este movimento é denominado cadeia cinemática aberta.
Muitos movimentos funcionais envolvendo a elevação de objetos e movimentos realizados na vida diária são movimentos de cadeia cinemática aberta.
Por exemplo: o antebraço flexiona em direção ao braço através de uma flexão do cotovelo em cadeia cinemática aberta, e o braço flexiona em relação ao tronco pela flexão do ombro, também em cadeia cinemática aberta.
Nestes movimentos, a origem fica fixa e a inserção se movimenta.
No movimento de flexão de braço, por exemplo, as mãos ficam fixas e o tronco se movimenta em relação ao membro superior, caracterizando um movimento de cadeia fechada.
A característica que distingue movimentos de cadeia fechada e de cadeia aberta é a função da extremidade distal da cadeia. Em cadeias abertas, os músculos se contraem para movimentar segmentos com extremidades distais que se movimentam livres no espaço. Os mesmos músculos contraem-se, através das mesmas articulações, para produzirem movimentos de cadeia fechada, quando as extremidades distais estão estáticas.
Fig. 1.16 - Cadeias cinemáticas: a) Aberta; b) Fechada Note que os dois movimentos são de flexão do quadril.
Polias Anatômicas
As polias anatômicas mudam a direção, mas não a magnitude de uma força muscular. No entanto, a mudança de direção de uma força muscular resulta numa melhoria da habilidade de geração de torque pelo músculo.
A mudança na direção (ou desvio) da linha de ação de um músculo é sempre para longe do eixo da articulação pela qual este músculo passa.
Desviando a linha de ação para longe do eixo articular, o braço de momento (BM) da força muscular aumenta com conseqüente aumento de torque.
joelho.
Um exemplo clássico de polia anatômica é a patela na articulação do
Fig. 1.17 - a)A patela aumenta a capacidade de produção de torque do quadríceps por distanciar a linha de ação do músculo do eixo do movimento. b) Sem a patela, o braço de momento do quadríceps diminui.
Componentes de Força
Uma força translatória pode resultar em dois componentes:
a) Componente compressivo - quando uma força translatória é aplicada na direção de uma articulação. .
b) Componente descompressivo - quando uma força translatória é aplicada na direção oposta à articulação.
Uma força rotatória resulta em movimento articular.
Uma mudança no componente rotatório deve indicar uma mudança na proporção de força total aplicada na direção da translação, pois as magnitudes do
componente rotatório e do componente translatório são inversamente proporcionais entre si, ou seja, quando há um aumento na força aplicada perpendicular à alavanca, concomitantemente, há uma diminuição da força aplicada paralela à alavanca (e vice-versa).
A maior parte da força produzida por um músculo contribui muito mais para compressão (e, às vezes para descompressão) do que para rotação articular. Assim, o músculo precisa gerar uma força total maior para produzir a força rotatória necessária para movimentar uma alavanca pelo espaço.
Os componentes translatórios da maioria das forças musculares contribuem para compressão articular, o que aumenta a estabilidade da articulação.
Fig.1.18 - Componentes rotatório e translatório resultantes da contração do bíceps branquial. Note que o componente rotatório é sempre perpendicular ao osso onde o músculo está inserido e o componente translatório é paralelo ao osso e aumenta a estabilidade do cotovelo (compressão) nesta situação.
Quanto mais perto o ângulo articular estiver do ponto em que o ângulo da inserção do músculo for 90°, mais efetiva é a força muscular em produzir movimento rotatório, ou seja, se o músculo estiver fazendo uma força perpendicular ao osso onde está inserido, toda esta força produzirá movimento rotatório e nenhum componente translatório.
O ângulo de 90° em relação ao osso praticamente não acontece para a maioria dos músculos do corpo humano e este ângulo do músculo quase nunca coincide com o mesmo ângulo para a articulação. No caso da articulação do cotovelo, por exemplo, o ponto em que a inserção do músculo bíceps braquial se aproxima de 90° é também a 90° de flexão desta articulação. Já para o músculo braquial, o cotovelo flexionado a 90° não é o ponto em que a sua inserção está mais próxima de perpendicular ao osso e o mesmo acontece com o músculo braquiorradial.
Fig. 1.19 - Resolução vetorial das forças aplicadas por três flexores do cotovelo (bíceps braquial,
braquial e braquiorradial).
Energia Elástica: Relação Força-Comprimento
A relação Força-Comprimento diz que a força contrátil que um músculo é capaz de produzir aumenta com o comprimento do mesmo e é máxima quando o músculo está no comprimento de repouso, ponto onde existe a maior sobreposição dos filamentos de actina e miosina.
A maior força total (força produzida no esqueleto) existe quando o músculo está em uma posição alongada. O aumento da tensão que ocorre no músculo alongado, entretanto, não é somente devido à força de contração mas também pela contribuição dos componentes elásticos nos tecidos.
Em geral, a maior tensão total pode ser produzida entre 120-130% do comprimento de repouso.
Fig. 1.20 - A relação força-comprimento do músculo esquelético. O aumento na tensão total é devido ao componente elástico.
Insuficiência Ativa e Passiva dos Músculos Bi-articulares
Insuficiência Ativa - Os músculos bi-articulares não podem exercer tensão bastante para encurtarem-se suficientemente e causarem amplitude articular total em ambas articulações ao mesmo tempo. Por exemplo, é muito difícil para o reto femural realizar força e amplitude para a extensão do joelho e a flexão do quadril ao mesmo tempo.
Quando um músculo começa a atingir uma insuficiência ativa, este precisa recrutar um maior número de unidades motoras para continuar produzindo movimento eficientemente.
Insuficiência Passiva - É muito difícil para um músculo bi-articular se alongar o bastante para permitir total amplitude articular em ambas as articulações ao mesmo tempo. Por exemplo, os isquiotibiais geralmente não conseguem deixar que a articulação do joelho estenda e a do quadril flexione completamente ao mesmo tempo. Os alongamentos favorecem a elasticidade muscular e, portanto, diminuem a probabilidade de insuficiência passiva precoce durante os movimentos do corpo humano, principalmente aqueles envolvendo músculos bi-articulares.

Apesar de serem mais expressivas nos músculos bi-articulares, as insuficiências ativa e passiva também acontecem nos músculos monoarticulares. Um dos atributos do ritmo escápulo-umeral é prevenir o músculo deltóide (que é mono-articular) de uma insuficiência ativa durante a abdução do ombro, por exemplo.
Fig. 1.21 - Exempla de insuficiência ativa e passiva dos isquiotibios
Aplicações da Biomecânica no Treinamento Resistido
A força gravitacional de um objeto sempre age para baixo. O braço de momento da resistência, no caso de pesos livres, é sempre horizontal. Assim, o torque produzido pelo peso de uma barra, por exemplo, é um produto de seu peso e a distância horizontal entre o peso e o centro da articulação. Embora durante um movimento o peso não se altere, o comprimento do braço de momento se altera durante toda a excursão do movimento. Quando o peso está horizontalmente mais perto do centro da articulação, ele exerce um menor torque resistivo e quando o peso está horizontalmente mais longe da articulação, ele exerce um maior torque resistivo.
Numa rosca direta, por exemplo, a maior distância horizontal entre a barra e o eixo da articulação é quando o antebraço está na posição horizontal. Nesta posição o indivíduo deve exercer o maior torque para suportar o peso (ou levantá-Io). O braço de momento diminui quando o antebraço se movimenta tanto no sentido da flexão quanto da extensão, diminuindo também o torque gerado pelo peso.
Quando o peso está diretamente acima ou abaixo da articulação, não há braço de momento e, conseqüentemente, não há torque resistivo.
Este conhecimento é fundamental para a perfeita aplicação da técnica de execução da maioria dos movimentos da musculação e também para a análise e prescrição dos exercícios.
Muitas vezes, durante os exercícios de musculação, várias articulações variam suas amplitudes, na intenção de diminuir o torque resistivo de uma articulação específica. Estas alterações são praticamente inconscientes e por isso o profissional da musculação deve estar sempre atendo à técnica de execução dos exercícios para a eficácia dos mesmos e para a prevenção de lesões.
Nos capítulos seguintes o leitor poderá compreender como este conhecimento da biomecânica pode se aplicar aos principais exercícios de musculação.
Tipos de Dispositivos para Treinamento Resistido
Dispositivos de Treinamento com Resistência Constante
Pesos Livres - O uso de pesos livres ou 'resistências constantes', tais como halteres para treinamento de força e resistência, é o mais usado na maior parte das academias.
Uma grande diferença do treinamento com pesos livres para o treinamento com máquinas é que com pesos livres há uma maior exigência de estabilização das articulações envolvidas, o que aumenta a atividade muscular.
Este tipo de treinamento tem algumas limitações pois o peso depende diretamente da ação da gravidade (que só atua no sentido vertical).Sendo assim, a melhor maneira de se trabalhar com o peso livre é posicionar o corpo de diferentes maneiras, para que à força motiva muscular mova o peso na direção vertical para cima (ou parcialmente para cima).
Quanto maior a aceleração vertical para cima, maior deve ser a força de contração concêntrica dos músculos envolvidos.
Os músculos que realizam movimentos no sentido horizontal (independentemente da posição do corpo) não são afetados diretamente pelos pesos livres.
Exemplo: No movimento de abdução horizontal, o deltóide posterior será o agonista do movimento com uma contração isotônica concêntrica e o deltóide anterior será responsável por desacelerar o movimento, através de uma contração isotônica excêntrica. O deltóide medial é quem fará o maior trabalho, pois é ele quem está segurando o peso do membro superior mais a resistência na posição abduzida (contração isométrica).
Há o aparecimento de momento, dependendo da velocidade de execução do exercício.
Dispositivos de Resistência Gravidade-Dependente
Estes aparelhos são os mais encontrados em salas de musculação.
O peso a ser levantado é preso a um cabo, que passa por uma ou mais roldanas, para colocar a alavanca numa posição conveniente para o usuário. A função das roldanas é mudar a direção da força aplicada. Embora a força resistiva das placas de peso empilhadas seja sempre para baixo, com o uso de uma roldana, a força resistiva pode se direcionar para cima.
O sistema de polias torna o trabalho versátil e conveniente para o trabalho de músculos isolados.
A amplitude dos movimentos realizados nestes aparelhos é limitada e muitos aparelhos não se adaptam à estrutura corporal do aluno.
O treinamento com este tipo de aparelho remove os requerimentos de equilíbrio e estabilização na execução do esforço. É importante lembrar que nas
atividades da vida diária o equilíbrio e estabilização são sempre necessários para total efetividade do movimento.
Assim como com os pesos livres, a aceleração dos pesos influenciará na sobrecarga muscular (inércia).
Há o aparecimento de momel1to, dependendo da velocidade de execução do exercício.
Algumas vantagens dos aparelhos incluem:
a) Segurança. O exercício torna-se um pouco mais seguro e requer menos habilidades do executante.
b) Flexibilidade. Os aparelhos podem ser estruturados para proporcionar resistência para movimentos do corpo, que são dificeis de serem executados resistidamente com pesos livres.
c) Facilidade de uso. É rápido e fácil escolher uma sobrecarga através da inserção de um pino nas placas.
Dispositivos de Resistência Variável
O torque produzido em um segmento por um grupo de músculos depende do ângulo de inserção muscular em relação ao osso e sua distância da articulação (braço de momento), bem como da relação força-comprimento dos músculos e da velocidade de encurtamento muscular.
Os aparelhos de resistência variável alteram a quantidade de torque da força resistiva durante toda a amplitude do movimento articular.
Estes aparelhos possuem roldanas com formas ovaladas, o que faz com que o braço de momento da força resistiva mude, conforme o cabo gira em torno da roldana, aumentando ou diminuindo a resistência durante diferentes momentos de um movimento.
A vantagem é que a resistência pode ser disposta para aumentar na posição em que o músculo pode produzir o maior torque, por causa da relação força-comprimento ou do maior braço de momento.
Dispositivos Isocinéticos
O termo isocinético foi originalmente criado para significar uma constante velocidade de encurtamento muscular quando um segmento trabalha contra um dispositivo estabelecido para mover numa velocidade constante.
Tem sido mostrado, no entanto, que a velocidade de rotação constante de um segmento não está associada com a velocidade constante do encurtamento muscular. O uso corrente do termo isocinético é aplicado à contração muscular que acompanha a constante velocidade angular de um membro.
Aparelhos isocinéticos (ou resistência acomodável) controlam a taxa máxima de movimento articular, porque eles podem ser programados para uma velocidade predeterminada.
A vantagem destas máquinas é que o usuário pode produzir tanta força quanto quiser por toda a amplitude do movimento que a resistência não aumentará a velocidade ou ganhará momento, como ocorre nos isotônicos.
A resistência desenvolvida é projetada para igualar a força que o indivíduo aplica ao aparelho.
Depois que o movimento atinge a velocidade preestabelecida, não importa quanta força você faça contra o aparelho, ele fará a mesma força na direção oposta (igual força de reação) mas não se moverá mais rápido.
Assim, o aparelho permite o desenvolvimento de máxima tensão muscular por toda a amplitude do movimento articular.
Este tipo de aparelho não é somente utilizado para exercícios resistidos mas também para diagnosticar fraqueza muscular e avaliar o progresso no processo de reabilitação.
Dispositivos Assistidos por Computador
Os aparelhos computadorizados podem ser uma alternativa para os dispositivos isocinéticos para acomodar o treinamento resistido.
Durante o curso de uma repetição, o computador adapta a resistência à curva de força do executante, alterando a resistência de acordo com a curva.
Estes aparelhos podem ser ajustáveis na resistência, na velocidade, na potência, acelerações, desacelerações e amplitudes de movimentos.
Além disso, o computador armazena dados como repetições, séries, trabalho por semana, por mês, entre outras variáveis.
Ainda pode-se saber o volume de treinamento de um dia para o outro ou de uma semana ou mês para o outro, melhorando muito o controle do treinamento, o que facilita a periodização.
Dispositivos Elástico-Resistidos
Os exercícios realizados com o uso de elásticos proporcionam pouca resistência no começo e muita resistência (de acordo com a espessura e propriedades do elástico) no final do movimento, pois a resistência é proporcional à distância que o elástico é alongado.
O uso de elásticos possui duas limitações:
a) O aumento da resistência acontece no final da amplitude articular, quando a capacidade de produção de força do sistema muscular diminui.
b) Os aparelhos que utilizam este dispositivo são limitados quanto ao número de elásticos, que podem ser fixados no aparelho e/ ou quanto à variação da espessura dos elásticos utilizados (elásticos mais espessos proporcionam maior resistência).